arduino-tutorial-es
30 - Módulo sensor de evasión de obstáculos
Descripción
El módulo produce una onda cuadrada de 38 kHz. Este pulso de 38 kHz se utiliza para encender/apagar el LED IR. Si hay un objeto frente al LED IR, los pulsos infrarrojos se reflejan y parte del IR reflejado es detectado por el receptor IR (HS0038BD). Esto indicaría al módulo que hay un obstáculo y colocará el pin de señal S en LOW. Si no hay obstáculo, el pin S estará en alto. El módulo tiene un rango de detección de ~2-40 cm.
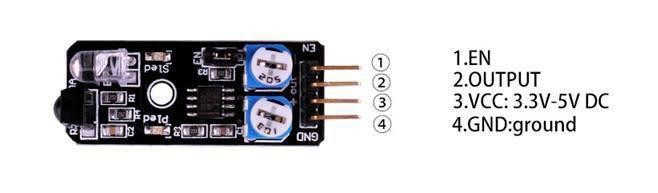
El pin EN y el puente EN se proporcionan para controlar la detección del módulo. Ponga un puente en EN para tener el módulo siempre habilitado. Si desea tener control sobre la habilitación/deshabilitación del módulo, retire el puente y conecte el pin EN a HIGH para habilitar o LOW para deshabilitar.
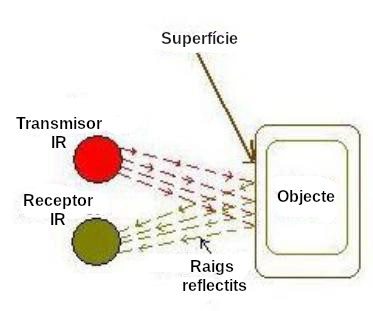
El concepto básico de la detección de obstáculos por infrarrojos es transmitir la señal IR (emisión) en una dirección y recibir una señal en el receptor IR cuando los rayos rebotan en la superficie del objeto.
Hay dos potenciómetros en el módulo, uno que controla la frecuencia de operación (centrada en 38 kHz) y otro que controla la intensidad. El detector fue diseñado para 38 kHz y el circuito oscilador integrado se basa en un temporizador 555.
Especificaciones
- Voltaje de funcionamiento: CC 3,3 V-5 V
- Corriente de trabajo: ≥20mA
- Temperatura de funcionamiento: -10 ℃ - +50 ℃
- Distancia de detección: 2-40 cm
- Interfaz I/O: 4 hilos (- / + / S /EN)
- Señal de salida: nivel TTL (LOW si hay un obstáculo, HIGH sin obstáculo)
- Ajuste: ajuste la resistencia de múltiples vueltas
- Ángulo efectivo: 35 °
- Tamaño: 28 mm × 23 mm
- Peso: 9g
Material
| Imagen | Descripción |
|---|---|
 |
Arduino Uno o equivalente. |
 |
Cables de conexión |
 |
Módulo de evitación de obstáculos KY032 |
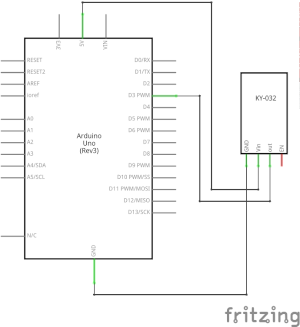
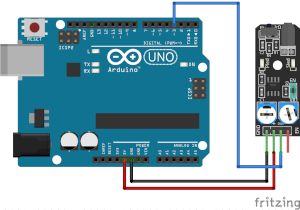
Conexión
Programación
Código: ARD030
/*
* Proyecto nº: ARD030
* Fecha: 27/0º/2022
* Descripción: Prueba del sensor de evitar obstáculos
* Nota:
*/
int Led = 13;
int buttonpin = 3;
int val;
void setup()
{
pinMode(Led, OUTPUT);
pinMode(buttonpin, INPUT);
}
void loop()
{
val = digitalRead(buttonpin);
if (val == HIGH)
{
digitalWrite(Led, HIGH);
}
else
{
digitalWrite(Led, LOW);
}
}