arduino-tutorial-es
31 - Módulo codificador rotatorio
Descripción general
El codificador rotatorio es un dispositivo de entrada rotatorio que proporciona una indicación de cuánto se ha girado la perilla y en qué dirección está girando.
Es un gran dispositivo para el control de motores paso a paso y servo. También puede usarlo para controlar dispositivos como potenciómetros digitales.
Material
| Imagen | Descripción |
|---|---|
 |
Arduino Uno o equivalente. |
 |
Cables de conexión |
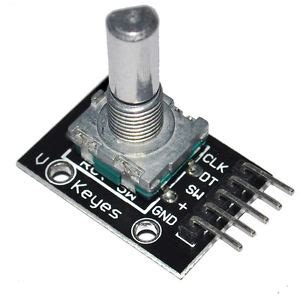 |
Módulo codificador rotatorio KY040 |
Especificaciones
- Voltaje de funcionamiento: 5V
- Ángulo mecánico: 360 grados
- Salida: código gris de 2 bits
- Posiciones por revolución: 30
Funcionamiento
Medición de posición rotatoria
Un codificador rotatorio o de “eje” es un dispositivo de medición angular. Se utiliza para medir con precisión la rotación de los motores o para crear controladores de rueda que pueden girar infinitamente (sin tope final como lo tiene un potenciómetro). Algunos de ellos también están equipados con un botón pulsador cuando presionas el eje (como los que se usan para la navegación en muchos controladores de música). Vienen en todo tipo de resoluciones, desde quizás 16 hasta al menos 1024 pasos por revolución. Los codificadores industriales vienen de 1200PPR a 10000PPR (Pulsos por revolución).
Principio de medición
Los codificadores rotatorios tienen dos o tres salidas A, B y Z. A y B se utilizan para determinar la dirección de rotación, y contar el número de pulsos dará la posición de rotación. Z está disponible en codificadores de grado industrial. Es pulso de posición cero. Solo da un pulso en una revolución.
Conceptos básicos del codificador rotatorio
Un codificador rotatorio tiene un número fijo de posiciones por revolución (PPR). El módulo Keyes KY-040 tiene treinta de estas posiciones.
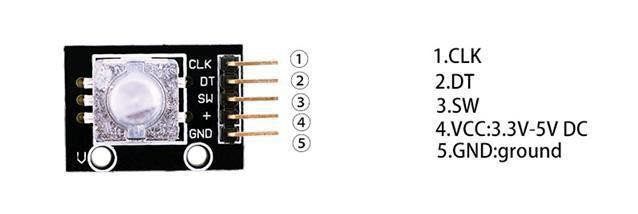
En un lado del interruptor hay tres pines. En el caso del KY-040, están orientados como se muestra.
Dentro del codificador hay dos interruptores. Un interruptor conecta el pin 1 al pin 2, y el otro interruptor conecta el pin 1 al 3.
En cada posición del codificador, ambos interruptores están abiertos o cerrados. Cada movimiento angular hace que estos interruptores cambien de estado de la siguiente manera:
- Si ambos interruptores están cerrados, girar el codificador en sentido horario o antihorario una posición hará que ambos interruptores se abran
- Si ambos interruptores están abiertos, girar el codificador en sentido horario o antihorario una posición hará que ambos interruptores se cierren.
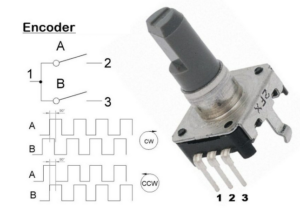
La siguiente ilustración es representativa de cómo se construye el interruptor.
La medición del ángulo de rotación se calcula con la siguiente fórmula:
\[Angulo = \left(\frac{360}{ppr}\right)·pulsos\]La salida A está conectada a la interrupción (ASCENSO) y cuando ocurre la interrupción, dependiendo del estado de la salida B, el conteo de pulsos se incrementa o disminuye.
Como podemos ver, la posición angular de la terminal A y la terminal B es tal que:
- Girar el interruptor en el sentido de las agujas del reloj hará que el interruptor que conecta A y C cambie primero de estado.
- Girar el interruptor en sentido contrario a las agujas del reloj hará que el interruptor que conecta B y C cambie primero de estado.
Si tuviéramos que representar la apertura y el cierre de los interruptores como formas de onda, se vería así:
Hay muchos codificadores disponibles en el mercado, todos tienen el principio básico de salida A,B, como se muestra en la figura. Algunos de los codificadores tienen GND, +V, SW, DT, CLK. La configuración de pines de estos codificadores es:
- CLK = A
- DT = B
- SW = interruptor de presión
- VCC = (+) 5V
- GND = (-)
El módulo está diseñado para que la salida sea baja cuando los interruptores están cerrados y alta cuando los interruptores están abiertos.
El nivel bajo se genera colocando una conexión a tierra en el pin C y pasándola a los pines CLK y DT cuando los interruptores están cerrados.
El nivel alto se genera con una entrada de suministro de 5 V y resistencias pull-up, de manera que CLK y DT están altos cuando los interruptores están abiertos.
No se mencionó anteriormente la existencia de un interruptor de botón que es parte integral del codificador. Si empuja el eje, un interruptor normalmente abierto se cerrará. La función es útil si desea cambiar la función del interruptor. Por ejemplo, es posible que desee tener la capacidad de realizar ajustes gruesos y finos.
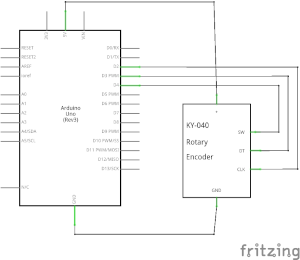
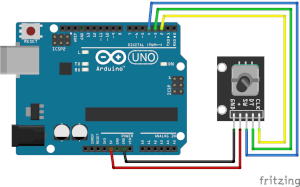
Conexión
Programación
Código: ARD031
/*
* Proyecto nº: ARD031
* Fecha: 29/01/2022
* Descripción: Prueba del módulo encoder KY040
* Nota:
*
*/
//Define la conexión de pines
int CLK = 2;//CLK->D2
int DT = 3;//DT->D3
int SW = 4;//SW->D4
const int interrupt0 = 0;
int count = 0;//Define el contador
int lastCLK = 0;//Valor inicial de CLK
void setup()
{
pinMode(SW, INPUT);
digitalWrite(SW, HIGH);
pinMode(CLK, INPUT);
pinMode(DT, INPUT);
attachInterrupt(interrupt0, ClockChanged, CHANGE);//Configura el manejador de interrupción 0, nivel de disparo cambio
Serial.begin(9600);
}
void loop()
{
if (!digitalRead(SW) && count != 0) //Lee la presión del botón y el valor del contador a 0 cuando se reinicia el contador
{
count = 0;
Serial.print("contador:");
Serial.println(count);
}
}
//Los manejadores de interrupción
void ClockChanged()
{
int clkValue = digitalRead(CLK);//Lee el nivel del pin CLK
int dtValue = digitalRead(DT);//Lee el nivel del pin DT
if (lastCLK != clkValue)
{
lastCLK = clkValue;
count += (clkValue != dtValue ? 1 : -1);//CLK y DT inconsistentes, +1, en caso contrario -1
Serial.print("contador:");
Serial.println(count);
}
}