arduino-tutorial-es
33 - Módulo sensor ultrasónico
Descripción general
El sensor ultrasónico es excelente para todo tipo de proyectos que necesitan mediciones de distancia, como evitar obstáculos por ejemplo.
El HC-SR04 es económico y fácil de usar, ya que disponemos de una biblioteca diseñada específicamente para estos sensores.
Material
| Imagen | Descripción |
|---|---|
 |
Arduino Uno o equivalente. |
 |
Cables de conexión |
 |
Módulo ultrasónico HC-SR04 |
Introducción de componentes
Sensor ultrasónico
Los sensores ultrasónicos funcionan emitiendo ondas de sonido con una frecuencia que es demasiado alta para que un humano las escuche. Estas ondas sonoras viajan por el aire a la velocidad del sonido, aproximadamente 343 m/s. Si hay un objeto frente al sensor, las ondas sonoras se reflejan y el receptor del sensor ultrasónico las detecta. Al medir cuánto tiempo pasó entre el envío y la recepción de las ondas de sonido, se puede calcular la distancia entre el sensor y el objeto.
A 20 °C, la velocidad del sonido es de aproximadamente 343 m/s o 0,034 cm/µs. Digamos que el tiempo entre el envío y la recepción de las ondas sonoras es de 2000 µs (microsegundos). Si multiplicas la velocidad del sonido por el tiempo que recorrieron las ondas sonoras, obtienes la distancia que recorrieron las ondas sonoras.
\[Distancia = Velocidad · Tiempo\]Pero este no es el resultado que buscamos. La distancia entre el sensor y el objeto es en realidad solo la mitad de esta distancia porque las ondas sonoras viajaron del sensor al objeto y de vuelta del objeto al sensor. Entonces necesitas dividir el resultado por dos.
\[Distancia (cm) = \frac{V_{sonido}(cm/\mu s) · T (\mu s)}{2}\]Y así, para el ejemplo, esto se convierte en:
\[Distancia (cm) = \frac{0,0343(cm/\mu s) · 2000 (\mu s)}{2} = 34,3 cm\]Dependencia de la velocidad del sonido con la temperatura
La velocidad del sonido en realidad depende en gran medida de la temperatura y en un grado mucho menor de la humedad del aire. Wikipedia afirma que la velocidad del sonido aumenta aproximadamente 0,6 m/s por grado Celsius. Para la mayoría de los casos a 20 °C, puede usar 343 m/s, pero si desea obtener lecturas más precisas, puede calcular la velocidad del sonido con la siguiente fórmula:
\[V_{sonido} (m/s) = 331,3 + (0,606 · T (ºC))\]- V = Velocidad del sonido (m/s)
- T = Temperatura del aire (°C)
Esta fórmula no incluye la humedad ya que su efecto sobre la velocidad del sonido es muy pequeño.
Podemos usar un sensor de temperatura y humedad DHT11 para calibrar la velocidad del sonido y obtener una lectura de distancia más precisa con el HC-SR04.
Cómo funciona el HC-SR04
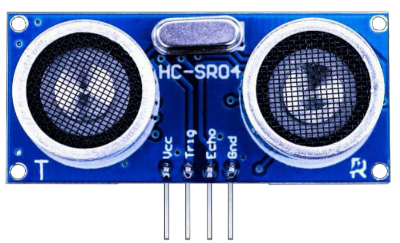
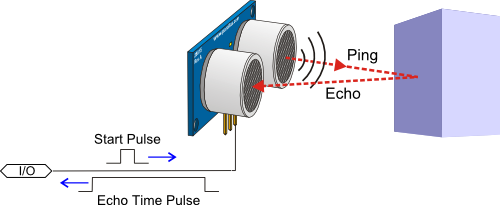
En la parte frontal del sensor HC-SR04, puede encontrar dos cilindros plateados (transductores ultrasónicos), uno es el transmisor de las ondas de sonido y el otro es el receptor. Para permitir que el sensor genere una explosión sónica, debe configurar el pin Trig en alto durante al menos 10 µs. Después, el sensor crea una ráfaga de ultrasonido de 8 ciclos a 40 kHz.
Esta explosión sónica viaja a la velocidad del sonido, rebota y es recibida por el receptor del sensor. El pin Echo luego emite el tiempo que las ondas de sonido viajaron en microsegundos.
Puede usar la función pulseIn() en el código Arduino para leer la longitud del pulso del pin Echo. Después de esto, puede usar la fórmula mencionada anteriormente para calcular la distancia entre el sensor y el objeto.
Especificaciones
- Voltaje de funcionamiento: 5 V
- Corriente de funcionamiento: 15 mA
- Frecuencia: 40kHz
- Rango de medición: 2 – 400 cm
- Resolución: 3mm
- Ángulo de medición: 15 grados
- Señal de entrada de disparo (trigger): 10 µs de pulso alto
Conexiones
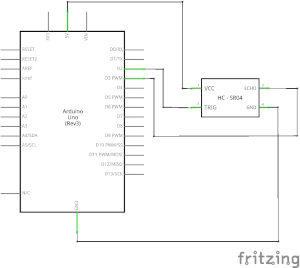
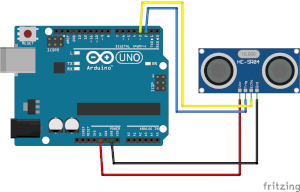
| HC-SR04 | Arduino |
|---|---|
| VCC | 5 V |
| Trig | Pin 2 |
| Echo | Pin 3 |
| GND | GND |
Programación
El siguiente código prueba el funcionamiento del sensor haciendo uso de la biblioteca «NewPing».
/*
* Proyecto nº: ARD033
* Fecha: 01/02/2022
* Descripción: Prueba del HC-SR04 con biblioteca
* Nota:
*
*/
#include <NewPing.h>
#define TRIGGER_PIN 2
#define ECHO_PIN 3
#define MAX_DISTANCE 200
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void setup()
{
Serial.begin(9600);
}
void loop()
{
delay(500);
unsigned int uS = sonar.ping();
Serial.print("Ping: ");
Serial.print(uS / US_ROUNDTRIP_CM);
Serial.println("cm");
}
Este código no utiliza ninguna biblioteca.
/*
* Proyecto nº: ARD033b
* Fecha: 01/02/2022
* Descripción: Prueba de HC-SR04 sin biblioteca
* Nota:
*
*/
// Define pins Trig and Echo
#define trigPin 2
#define echoPin 3
// Define variables
long duration;
int distance;
void setup()
{
// Define entradas y salidas
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
//Inicia comunicación serie a 9600 bps
Serial.begin(9600);
}
void loop()
{
// Limpia trigPin poniendo la salida a LOW
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
// Dispara el sensor estableciendo trigPin a HIGH por 10 microsegundos:
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Lee echoPin, pulseIn() devuelve la duración en microsegundos:
duration = pulseIn(echoPin, HIGH);
// Calcula la distancia
distance = duration * 0.034 / 2;
// Imprime la distancia en el monitor serie
Serial.print("Distancia = ");
Serial.print(distance);
Serial.println(" cm");
delay(50);
}