arduino-tutorial-es
34 – Módulo GY-521
Descripción general
En esta lección, aprenderemos a usar el módulo GY-521 (MPU-6050), que es uno de los mejores sensores de medición de inercia IMU (Inertia Measurement Unit), compatible con Arduino.
Los sensores IMU como el GY-521 (MPU-6050) se utilizan en robots auto-equilibrados, vehículos aéreos no tripulados, teléfonos inteligentes, etc.
Material
| Imagen | Descripción |
|---|---|
 |
Arduino Uno o equivalente. |
 |
Cables de conexión |
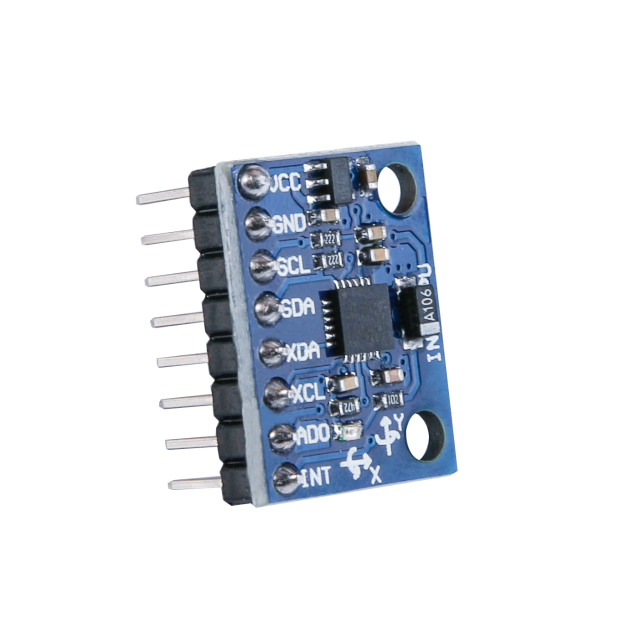 |
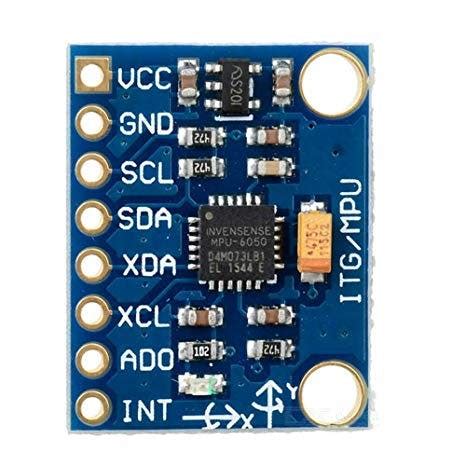
Módulo GY-521 |
Introducción de componentes
Sensor GY-521
El sensor InvenSense GY-521 contiene un acelerómetro MEMS y un giroscopio MEMS en un solo chip (MEMS = MicroElectroMechanic System). Es muy preciso, ya que contiene hardware de conversión de analógico a digital de 16 bits por cada canal. Por lo tanto, captura el canal x, y y z al mismo tiempo. El sensor utiliza el bus I2C para interactuar con el Arduino.
El GY-521 no es caro, especialmente considerando que combina un acelerómetro y un giroscopio.
Los sensores IMU son uno de los tipos de sensores más inevitables que se utilizan hoy día en toda clase de dispositivos electrónicos.
Se ven en teléfonos inteligentes, dispositivos portátiles, controladores de juegos, etc. Los sensores IMU nos ayudan a obtener la posición de un objeto adjunto al sensor en un espacio tridimensional. Estos valores suelen estar en ángulos, lo que nos ayuda a determinar su posición. Por lo tanto, se utilizan en teléfonos inteligentes para detectar su orientación. Y también, en dispositivos portátiles como la “fit band”, que usan sensores IMU para rastrear el movimiento.
¿Cómo funciona?
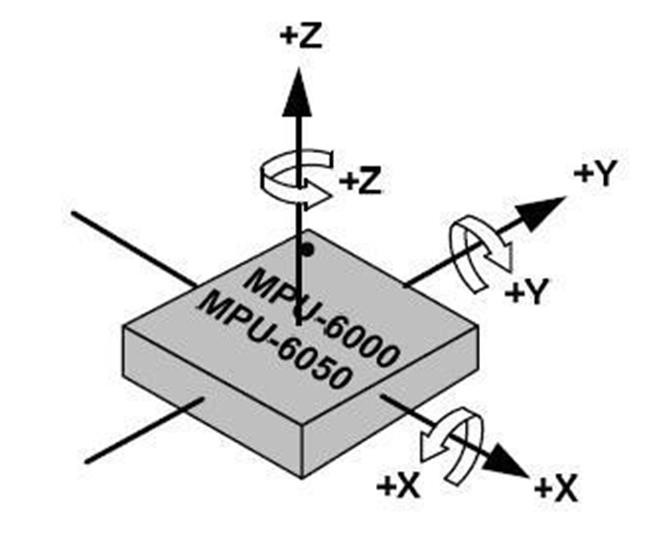
Los sensores IMU generalmente constan de dos o más partes. Enumerándolos por prioridad, son: acelerómetro, giroscopio, magnetómetro y altímetro. El GY-521 es un sensor IMU de 6 grados de libertad (DOF = Degrees Of Freedom) o de seis ejes, lo que significa que da seis valores como salida. Tres valores del acelerómetro y tres del giroscopio. El GY-521 es un sensor basado en tecnología MEMS (Micro Electro Mechanical Systems). Tanto el acelerómetro como el giroscopio están integrados dentro de un solo chip. Este chip utiliza el protocolo I2C (Inter Integrated Circuit) para la comunicación.
¿Cómo funciona un acelerómetro?
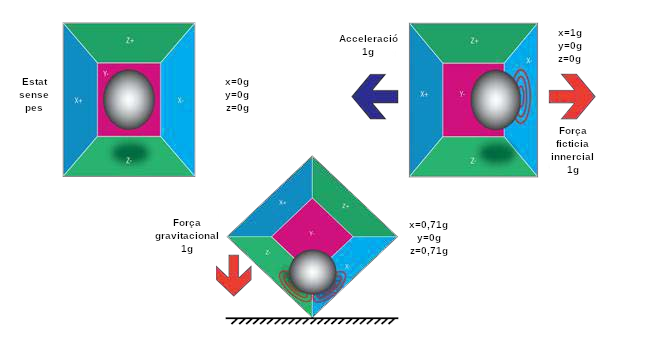
Un acelerómetro funciona según el principio del efecto piezoeléctrico. Aquí, imagina una caja con forma de cubo, con una pequeña bola dentro, como en la imagen de arriba. Las paredes de esta caja están hechas con cristales piezoeléctricos.
Cada vez que inclinas la caja, la bola se ve obligada a moverse en la dirección de la inclinación, a causa de la gravedad.
La pared con la que choca la bola crea pequeñas corrientes piezoeléctricas. Hay en total, tres pares de paredes opuestas en un paralelepípedo. Cada par corresponde a un eje en el espacio 3D: ejes X, Y y Z. Dependiendo de la corriente producida por las paredes piezoeléctricas, podemos determinar la dirección de inclinación y su magnitud.
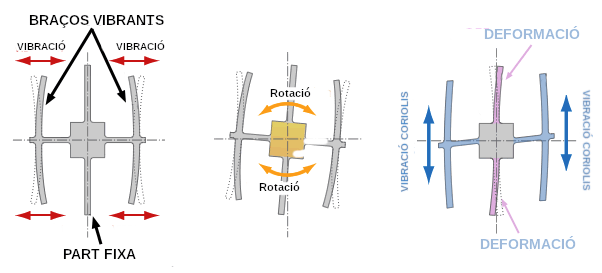
¿Cómo funciona un giroscopio?
Los giroscopios funcionan según el principio de la aceleración de Coriolis. Imagina que hay una estructura similar a un tenedor, que está en constante movimiento hacia adelante y hacia atrás. Se mantiene en su lugar mediante cristales piezoeléctricos. Cada vez que intenta inclinar este arreglo, los cristales experimentan una fuerza en la dirección de la inclinación. Esto se produce como resultado de la inercia del tenedor en movimiento.
Los cristales producen así una corriente en consenso con el efecto piezoeléctrico, y esta corriente se amplifica. Después, los valores son refinados por el microcontrolador.
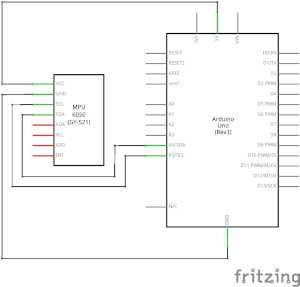
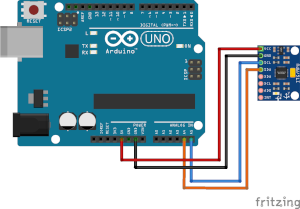
Conexión
Programación
Los ejemplos siguientes son traducción del artículo de Luis Llamas (https://www.luisllamas.es/arduino-orientacion-imu-mpu-6050/).
Para realizar la lectura del MPU-6050 usaremos la librería desarrollada por Jeff Rowberg disponible en este enlace. También emplearemos la librería I2Cdev desarrollada por el mismo autor, que mejora la comunicación I2C.
La librería proporciona ejemplos de código, que resulta aconsejable revisar. Los siguientes ejemplos son modificaciones a partir de los disponibles en la librería.
Leer valores RAW
En el primer ejemplo, aprendemos a leer los valores directamente proporcionados por el MPU-6050 (valores RAW) a través del bus I2C. Los valores RAW tienen un rango de medición entre -32768 y +32767.
/*
* Proyecto nº: ARD034a
* Fecha: 03/02/2022
* Descripción: Leer valores RAW
* Nota: traducido de Luis Llamas
*
*/
//GND - GND
//VCC - VCC
//SDA - Pin A4
//SCL - Pin A5
#include "I2Cdev.h"
#include "MPU6050.h"
#include "Wire.h"
const int mpuAddress = 0x68; //Puede ser 0x68 o 0x69
MPU6050 mpu(mpuAddress);
int ax, ay, az;
int gx, gy, gz;
void printTab()
{
Serial.print(F("t"));
}
void printRAW()
{
Serial.print(F("a[x y z] g[x y z]:t"));
Serial.print(ax); printTab();
Serial.print(ay); printTab();
Serial.print(az); printTab();
Serial.print(gx); printTab();
Serial.print(gy); printTab();
Serial.println(gz);
}
void setup()
{
Serial.begin(9600);
Wire.begin();
mpu.initialize();
Serial.println(mpu.testConnection() ? F("IMU iniciado correctamente") : F("Error al iniciar IMU"));
}
void loop()
{
// Leer las aceleraciones y velocidades angulares
mpu.getAcceleration(&ax, &ay, &az);
mpu.getRotation(&gx, &gy, &gz);
printRAW();
delay(100);
}
Leer valores en Sistema Internacional
En el siguiente ejemplo aplicamos una escala a los valores RAW para obtener mediciones con significado físico. En el ejemplo, emplearemos valores G para la aceleración, y º/s para la velocidad angular. Con facilidad podrás modificar el código para que proporcione los valores en unidades del Sistema Internacional. El escalado dependerá del rango de medición que seleccionemos en el MPU-6050, que recordamos puede ser 2g/4g/8g/16g para el acelerómetro y 250/500/1000/2000 (°/s) para el giroscopio.
/*
* Proyecto nº: ARD034b
* Fecha: 03/02/2022
* Descripción: Leer valores en SI
* Nota:
*
*/
//GND - GND
//VCC - VCC
//SDA - Pin A4
//SCL - Pin A5
#include "I2Cdev.h"
#include "MPU6050.h"
#include "Wire.h"
const int mpuAddress = 0x68; // Puede ser 0x68 o 0x69
MPU6050 mpu(mpuAddress);
int ax, ay, az;
int gx, gy, gz;
// Factores de conversión
const float accScale = 2.0 * 9.81 / 32768.0;
const float gyroScale = 250.0 / 32768.0;
void printTab()
{
Serial.print(F("t"));
}
// Mostrar medidas en Sistema Internacional
void printRAW()
{
Serial.print(F("a[x y z](m/s2) g[x y z](deg/s):t"));
Serial.print(ax * accScale); printTab();
Serial.print(ay * accScale); printTab();
Serial.print(az * accScale); printTab();
Serial.print(gx * gyroScale); printTab();
Serial.print(gy * gyroScale); printTab();
Serial.println(gz * gyroScale);
}
void setup()
{
Serial.begin(9600);
Wire.begin();
mpu.initialize();
Serial.println(mpu.testConnection() ? F("IMU iniciado correctamente") : F("Error al iniciar IMU"));
}
void loop()
{
// Leer las aceleraciones y velocidades angulares
mpu.getAcceleration(&ax, &ay, &az);
mpu.getRotation(&gx, &gy, &gz);
printRAW();
delay(100);
}
Leer inclinación con acelerómetro
En el siguiente ejemplo, calculamos la inclinación del MPU-6050 mediante la proyección de la medición de la gravedad y las relaciones trigonométricas que podemos ver en la entrada Cómo usar un acelerómetro con Arduino.
/*
* Proyecto nº: ARD034c
* Fecha: 03/02/2022
* Descripción: Leer inclinación con acelerómetro
* Nota:
*
*/
//GND - GND
//VCC - VCC
//SDA - Pin A4
//SCL - Pin A5
#include "I2Cdev.h"
#include "MPU6050.h"
#include "Wire.h"
const int mpuAddress = 0x68; // Puede ser 0x68 o 0x69
MPU6050 mpu(mpuAddress);
int ax, ay, az;
int gx, gy, gz;
void setup()
{
Serial.begin(9600);
Wire.begin();
mpu.initialize();
Serial.println(mpu.testConnection() ? F("IMU iniciado correctamente") : F("Error al iniciar IMU"));
}
void loop()
{
// Leer las aceleraciones
mpu.getAcceleration(&ax, &ay, &az);
//Calcular los ángulos de inclinación
float accel_ang_x = atan(ax / sqrt(pow(ay, 2) + pow(az, 2)))*(180.0 / 3.14);
float accel_ang_y = atan(ay / sqrt(pow(ax, 2) + pow(az, 2)))*(180.0 / 3.14);
// Mostrar resultados
Serial.print(F("Inclinación en X: "));
Serial.print(accel_ang_x);
Serial.print(F("Inclinación en Y:"));
Serial.println(accel_ang_y);
delay(10);
}
Obtener orientación con giroscopio
En el siguiente ejemplo, realizamos la integración de la señal de la velocidad del giroscopio para obtener la orientación del MPU-6050, como podemos ver en la entrada Cómo usar un giroscopio con Arduino.
/*
* Proyecto nº: ARD034d
* Fecha: 03/02/2022
* Descripción: Obtener orientación con giroscopio
* Nota:
*
*/
//GND - GND
//VCC - VCC
//SDA - Pin A4
//SCL - Pin A5
#include "I2Cdev.h"
#include "MPU6050.h"
#include "Wire.h"
const int mpuAddress = 0x68; // Puede ser 0x68 o 0x69
MPU6050 mpu(mpuAddress);
int ax, ay, az;
int gx, gy, gz;
long tiempo_prev, dt;
float girosc_ang_x, girosc_ang_y;
float girosc_ang_x_prev, girosc_ang_y_prev;
void updateGiro()
{
dt = millis() - tiempo_prev;
tiempo_prev = millis();
girosc_ang_x = (gx / 131)*dt / 1000.0 + girosc_ang_x_prev;
girosc_ang_y = (gy / 131)*dt / 1000.0 + girosc_ang_y_prev;
girosc_ang_x_prev = girosc_ang_x;
girosc_ang_y_prev = girosc_ang_y;
}
void setup()
{
Serial.begin(9600);
Wire.begin();
mpu.initialize();
Serial.println(mpu.testConnection() ? F("IMU iniciado correctamente ") :F("Error al iniciar IMU"));
}
void loop()
{
// Leer las velocidades angulares
mpu.getRotation(&gx, &gy, &gz);
updateGiro();
// Mostrar resultados
Serial.print(F("Rotación en X: "));
Serial.print(girosc_ang_x);
Serial.print(F("Rotación en Y: "));
Serial.println(girosc_ang_y);
delay(10);
}
Obtener la orientación con filtro complementario
Este ejemplo emplea un filtro complementario para combinar la señal del acelerómetro y giroscopio para obtener una mejor medición de la orientación del MPU-6050, como podemos ver en la entrada Medir la inclinación de un IMU con Arduino y filtro complementario.
/*
* Proyecto nº: ARD034e
* Fecha: 03/02/2022
* Descripción: Obtener la orientación con filtro complementario
* Nota:
*
*/
//GND - GND
//VCC - VCC
//SDA - Pin A4
//SCL - Pin A5
#include "I2Cdev.h"
#include "MPU6050.h"
#include "Wire.h"
const int mpuAddress = 0x68; // Puede ser 0x68 o 0x69
MPU6050 mpu(mpuAddress);
int ax, ay, az;
int gx, gy, gz;
long tiempo_prev;
float dt;
float ang_x, ang_y;
float ang_x_prev, ang_y_prev;
void updateFiltered()
{
dt = (millis() - tiempo_prev) / 1000.0;
tiempo_prev = millis();
//Calcular los ángulos con acelerómetro
float accel_ang_x = atan(ay / sqrt(pow(ax, 2) + pow(az, 2)))*(180.0 / 3.14);
float accel_ang_y = atan(-ax / sqrt(pow(ay, 2) + pow(az, 2)))*(180.0 / 3.14);
//Calcular ángulo de rotación con giroscopio y filtro complementario
ang_x = 0.98*(ang_x_prev + (gx / 131)*dt) + 0.02*accel_ang_x;
ang_y = 0.98*(ang_y_prev + (gy / 131)*dt) + 0.02*accel_ang_y;
ang_x_prev = ang_x;
ang_y_prev = ang_y;
}
void setup()
{
Serial.begin(9600);
Wire.begin();
mpu.initialize();
Serial.println(mpu.testConnection() ? F("IMU iniciado correctamente") :F("Error al iniciar IMU"));
}
void loop()
{
// Leer las aceleraciones y velocidades angulares
mpu.getAcceleration(&ax, &ay, &az);
mpu.getRotation(&gx, &gy, &gz);
updateFiltered();
Serial.print(F("Rotación en X: "));
Serial.print(ang_x);
Serial.print(F(" Rotación en Y: "));
Serial.println(ang_y);
delay(10);
}
Obtener la orientación mediante el DMP
En este último ejemplo empleamos el DMP integrado en el MPU-6050 para realizar la combinación de la medición del acelerómetro y el giroscopio, lo que proporciona mejores resultados que emplear un filtro complementario, y además libera a Arduino del proceso de cálculo.
Para que el ejemplo funcione es necesario conectar el pin INT del MPU6050 a un pin con interrupciones (en el ejemplo, con Arduino UNO o Nano, conectar al Pin 2).
/*
* Proyecto nº: ARD034g
* Fecha: 03/02/2022
* Descripción: Obtener la orientación mediante el DMP
* Nota:
*
*/
//GND - GND
//VCC - VCC
//SDA - Pin A4
//SCL - Pin A5
//INT - Pin 2
#include "I2Cdev.h"
#include "MPU6050_6Axis_MotionApps20.h"
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68
// AD0 high = 0x69
MPU6050 mpu;
//MPU6050 mpu(0x69); // <-- use for AD0 high
#define INTERRUPT_PIN 2
#define LED_PIN 13
bool blinkState = false;
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
Quaternion q; // [w, x, y, z]
VectorInt16 aa; // [x, y, z]
VectorInt16 aaReal; // [x, y, z]
VectorInt16 aaWorld; // [x, y, z]
VectorFloat gravity; // [x, y, z]
float ypr[3]; // [yaw, pitch, roll]
volatile bool mpuInterrupt = false;
void dmpDataReady()
{
mpuInterrupt = true;
}
void setup()
{
// join I2C bus (I2Cdev library doesn't do this automatically)
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
Wire.setClock(400000); // 400kHz I2C clock. Comment this line if having compilation difficulties
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
Serial.begin(9600);
// Iniciar MPU6050
Serial.println(F("Initializing I2C devices..."));
mpu.initialize();
pinMode(INTERRUPT_PIN, INPUT);
// Comprobar conexión
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// Iniciar DMP
Serial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// Valores de calibración
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1688);
// Activar DMP
if (devStatus == 0)
{
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// Activar interrupción
attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
}
else
{
// ERROR!
// 1 = initial memory load failed
// 2 = DMP configuration updates failed
// (if it's going to break, usually the code will be 1)
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
}
void loop()
{
// Si falló al iniciar, parar programa
if (!dmpReady) return;
// Ejecutar mientras no hay interrupción
while (!mpuInterrupt && fifoCount < packetSize)
{
// AQUI EL RESTO DEL CODIGO DE TU PROGRAMA
}
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// Obtener datos del FIFO
fifoCount = mpu.getFIFOCount();
// Controlar overflow
if ((mpuIntStatus & 0x10) || fifoCount == 1024)
{
mpu.resetFIFO();
Serial.println(F("FIFO overflow!"));
}
else if (mpuIntStatus & 0x02)
{
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
// Mostrar Yaw, Pitch, Roll
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
Serial.print("ypr");
Serial.print(ypr[0] * 180/M_PI);
Serial.print("\t");
Serial.print(ypr[1] * 180/M_PI);
Serial.print("\t");
Serial.println(ypr[2] * 180/M_PI);
// Mostrar aceleración
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetAccel(&aa, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetLinearAccel(&aaReal, &aa, &gravity);
Serial.print("areal\t");
Serial.print(aaReal.x);
Serial.print("\t");
Serial.print(aaReal.y);
Serial.print("\t");
Serial.println(aaReal.z);
}
}