arduino-tutorial-es
35 - Módulo sensor PIR HC-SR501
Descripción general
En esta lección aprenderá a utilizar un detector de movimiento PIR con un Arduino UNO.
El Arduino UNO es el corazón de este proyecto. ‘Escucha’ al sensor PIR y cuando detecta movimiento, indica al LED que se encienda o se apague.
Material
| Imagen | Descripción |
|---|---|
 |
Arduino Uno o equivalente. |
 |
Cables de conexión |
 |
Módulo sensor PIR HC-SR501 |
Introducción a los componentes
Sensor PIR
Los sensores PIR son más complicados que muchos de los otros sensores explicados en este tutorial (como fotocélulas, interruptores de inclinación, …) porque existen múltiples variables que afectan la entrada y salida de los sensores.
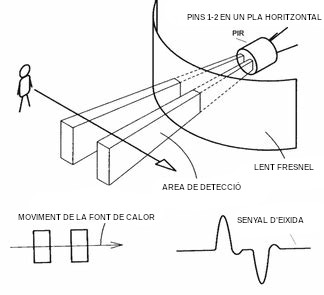
El sensor PIR en sí tiene dos ranuras. Cada ranura está hecha de un material especial que es sensible a IR. La lente utilizada aquí realmente no está haciendo mucho, por lo que vemos que las dos ranuras pueden ‘ver’ más allá de una cierta distancia (básicamente, la sensibilidad del sensor). Cuando el sensor está inactivo, ambas ranuras detectan la misma cantidad de IR, la cantidad ambiental radiada desde la habitación, las paredes o el exterior. Cuando pasa un cuerpo caliente como un ser humano o un animal, primero intercepta la mitad del sensor PIR, lo que provoca un cambio diferencial positivo entre las dos partes. Cuando el cuerpo caliente sale del área de detección, ocurre lo contrario, por lo que el sensor genera un cambio diferencial negativo. Estos pulsos de cambio son los que se detectan.
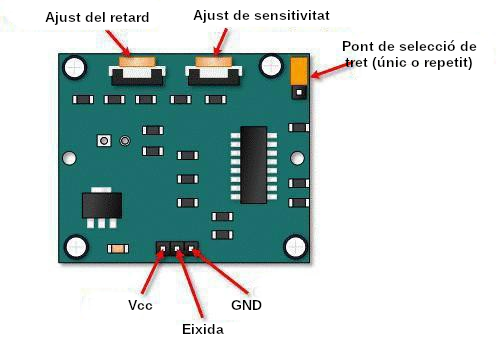
| Pin del módulo | Función |
|---|---|
| Ajuste de retardo | Establece cuánto tiempo permanece alta la salida después de detectar movimiento…. Entre 5 segundos y 5 minutos. |
| Ajuste de sensibilidad | Establece el rango de detección… de 3 metros a 7 metros |
| Puente de selección de disparo | Juego de puentes para disparos simples o repetibles. |
| GND | GND |
| Pin de salida | LOW cuando no se detecta movimiento. HIGH cuando se detecta movimiento. |
| Vcc | Alimentación |
HC SR501 PIR Descripción funcional
El SR501 detectará cambios infrarrojos y, si se interpreta como movimiento, establecerá su salida en un nivel alto. Lo que se interpreta o no como movimiento depende en gran medida de la configuración y los ajustes del usuario.
Inicialización del dispositivo
El dispositivo requiere casi un minuto para inicializarse. Durante este período, puede emitir señales de detección falsas, y con frecuencia lo hará. La lógica del circuito o del controlador debe tener en cuenta este período de inicialización.
Área de detección del dispositivo
El dispositivo detectará movimiento dentro de un cono de 110 grados con un alcance de 3 a 7 metros.
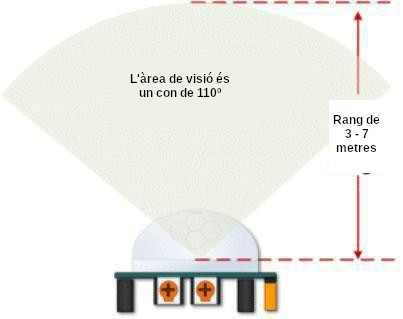
HC SR501 Área de visualización
Ajuste del rango PIR (Sensibilidad) como se mencionó, el rango ajustable es de aproximadamente 3 a 7 metros. La siguiente tabla muestra este ajuste.
| Giro | Descripción |
|---|---|
 |
Hacia la derecha. Disminuir la sensibilidad. Totalmente a la derecha y el alcance será de aproximadamente 3 metros. |
 |
Hacia la izquierda. Aumenta la sensibilidad. Completamente a la izquierda y el alcance será de aproximadamente 7 metros. |
HC SR501 Ajuste de retardo de tiempo
El ajuste de retardo de tiempo determina cuánto tiempo permanecerá alta la salida del módulo del sensor PIR después de la detección de movimiento. El rango es de aproximadamente 3 segundos a cinco minutos.
| Giro | Descripción |
|---|---|
|
Hacia la derecha. Aumentar el retardo. Totalmente a la derecha y el retardo será de aproximadamente 5 min. |
|
Hacia la izquierda. Aumenta la sensibilidad. Completamente a la izquierda y el retardo será de aproximadamente 3 segundos. |
IMPORTANTE: son necesarios 3 segundos de inactividad después de que se complete el tiempo de retardo.
La salida de este dispositivo pasará a BAJO (o apagado) durante aproximadamente 3 segundos después de que finalice el tiempo de retardo. En otras palabras, toda la detección de movimiento se bloquea durante este período de tres segundos.
Por ejemplo:
Imagina que estás en el modo de disparo único y tu tiempo de retardo está establecido en 5 segundos. El PIR detectará movimiento y lo configurará alto durante 5 segundos. Después de cinco segundos, el PIR establecerá su salida baja durante unos 3 segundos. Durante los tres segundos, el PIR no detectará movimiento. Después de tres segundos, el PIR detectará movimiento nuevamente y el movimiento detectado establecerá una vez más la salida alta.
Puente de selección de modo de disparo
El puente de selección de modo de disparo le permite seleccionar entre disparos simples y repetibles. El efecto de esta configuración de puente es determinar cuándo comienza el retardo de tiempo.
- DISPARADOR ÚNICO: el tiempo de retardo comienza inmediatamente cuando se detecta movimiento por primera vez.
- DISPARADOR REPETIBLE: cada movimiento detectado reinicia el retardo de tiempo. Así, el retardo de tiempo comienza con el último movimiento detectado.
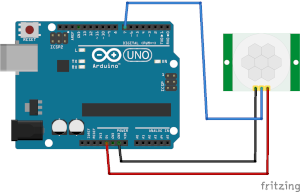
Conexión
Programación
Código:ARD035
/*
* Proyecto nº: ARD035
* Fecha: 07/02/2022
* Descripción: Prueba del sensor HC SR501
* Nota:
*
*/
const int LEDPin= 13;
const int PIRPin= 2;
void setup()
{
pinMode(LEDPin, OUTPUT);
pinMode(PIRPin, INPUT);
}
void loop()
{
int value= digitalRead(PIRPin);
if (value == HIGH)
{
digitalWrite(LEDPin, HIGH);
delay(50);
digitalWrite(LEDPin, LOW);
delay(50);
}
else
{
digitalWrite(LEDPin, LOW);
}
}